- Other Fluke companies:
- Fluke
- Fluke Biomedical
- Fluke Networks
- Fluke Process Instruments
See more Fluke brands
Authors: Rick Walker and Alan Cordner Fluke Corporation, Hart Scientific Division
The need arose for a temperature and relative humidity calibration system that is capable of simultaneously calibrating a number of high-accuracy temperature and relative humidity sensors. These sensors have temperature accuracy specifications as low as ±0.125°C over the temperature range 16 to 24°C, and ±0.25°C over the range 15 to 35°C. The relative humidity accuracy specifications for these sensors are as low as ±1.5% over the range 20 to 70%, 16 to 24°C, and ±2.0% from 20 to 70%, 15 to 35°C. It is important to maintain a test uncertainty ratio between the specifications and uncertainties of the calibration standards of at least 4:1 and a TUR between the specifications and combined calibration uncertainties of at least 3:1. For efficiency, the system is required to be able to calibrate ten sensors simultaneously. Complicating the efforts to develop a satisfactory calibration system were the self heating and mutual heating of the sensors and temperature nonuniformity within the calibration chamber. The system also needed to be convenient and operator-friendly. The authors and their colleagues set about to create a temperature and relative humidity calibration system that would meet the requirements. This paper describes the relevant characteristics of the sensors of interest and the requirements of the calibration system. The construction and components of the realized system are discussed. The performance of the system is presented in terms of calibration uncertainties, with contributing components detailed.
Most calibration laboratory equipment and processes are to some degree sensitive to ambient temperature and relative humidity. Calibration uncertainties depend on maintaining temperature and relative humidity within certain tolerances. Deviations outside of limits can cause large uncertainties and disqualify calibration work. In a temperature calibration laboratory, temperature and relative humidity might need to be maintained within ±2°C and ±15% respectively. For a mass and dimension laboratory, environmental tolerances might be as tight as ±0.25°C and ±5%. Ambient temperature and relative humidity are important enough that they are generally expected to be reported on calibration certificates.
Maintenance of laboratory temperature and relative humidity requires not only an air handling system that controls the environment, but also monitoring devices that ensure that the system is Fluke Hart Scientific has developed a digital temperature/relative humidity recorder that can store more than a year of data for two sensors and is accurate to ±0.125°C and ±1.5% RH.
One of the difficulties in producing such an instrument is testing and calibrating it to ensure it meets specifications and will remain within specifications long term. As with any calibration, the calibration uncertainties must be much smaller than the product’s specified accuracy to allow for drift over time and nonlinearity between calibration points. A commonly used rule is to use calibration standards that have uncertainties that are no more than 25% of the required tolerances of the device under test (DUT). Achieving and maintaining adequately low uncertainties in the equipment and process used at Fluke Hart Scientific to calibrate the temperature/relative humidity recorders required special effort. This paper will further describe the temperature/relative humidity recorder and its sensors, explain the challenges faced in calibrating these sensors, present the calibration system that was devised to meet the requirements, and show the resulting performance of the system including a detailed uncertainty analysis.
The temperature/relative humidity recorder of interest is comprised of a display unit and one or two sensor units, each with both a temperature sensing element (thermistor) and relative humidity sensing device [1]. The sensor units can be attached directly to the display unit or connected through long cables (see Figure 1). Thus the instrument is capable of simultaneously monitoring temperature and relative humidity at two separated locations.
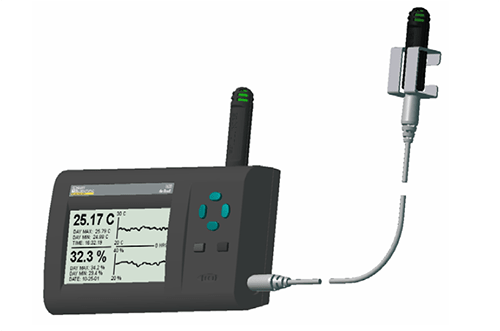
The sensor units contain analog-to-digital converters. Digital representations of the measurements pass from the sensor units to the display unit. Thus accuracy depends entirely on the sensor unit; neither the display unit nor connecting cables have any effect on the measurements. This also means that only the sensor units need to be calibrated, and they can be calibrated without being matched to the display unit with which they will subsequently be used. Calibration adjustments of sensor units involve setting digital parameters that are stored in non-volatile memory within the sensor units, which values characterize the uniqueness of each sensor. The sensor unit’s memory also stores identification information, including model number, serial number, a user-specified name, and date of calibration. Again, because each sensor unit contains its own characterization, it can be calibrated independently. A display unit needs no calibration.
Sensor units are cylindrically shaped, with a diameter of 19 mm (0.75 in.) and a length of about 78 mm (3.1in.).
A characteristic of the sensor units that must be taken into account is self-heating. Their electronic ircuits produce a small amount of heat that makes them tend to measure temperature slightly higher than the nvironment. For the most part, self-heating error is corrected with calibration. A problem, however, is hat self-heating is somewhat dependent on air velocity. The calibration procedure must specify a particular ir speed (3.5 cm/s). The product’s accuracy specifications allow for possible operation in air currents iffering from the calibration condition.
Another characteristic of the sensors that affects calibration is hysteresis. Negligible hysteresis is seen with the temperature element. But the humidity device can exhibit hysteresis as large as 0.3%. This effect should be considered in the calibration procedure.
The best specified temperature accuracy of the temperature/relative humidity recorder is ±0.125°C from 16 to 24°C. With an alternate calibration over a wider range of 15 to 35°C, the accuracy is ±0.25°C. This paper will focus on the lower uncertainties required in the first case.
The best specified relative humidity accuracy of the recorder is ±1.5% over a range of 20 to 70%, applicable over a temperature range of 16 to 24°C. Over the alternate temperature range of 15 to 35°C, the relative humidity accuracy is ±2%. Again, this paper will focus on the lower uncertainties required in the first case.
Measurement errors of the sensors can be corrected by setting unique offset and slope adjustment parameters, which are stored in the sensor unit’s nonvolatile memory. Both temperature and relative humidity measurement have associated offset and slope adjustment parameters. Linearity of the sensors over the range of measurement is quite good so that linearity corrections are unnecessary. However, linearity should still be tested during calibration to ensure the sensors meet specifications over the entire range. Calibration should include points at the extremes of the ranges and a point near the middle.
The temperature measurement of the sensor is not noticeably affected by relative humidity. But temperature possibly does have a significant effect on the relative humidity measurement. The calibration procedure specifies that relative humidity be calibrated at the midpoint of the temperature range. The product’s relative humidity accuracy specifications allow for possible operation at other temperatures within the specified temperature range.
The system to be used to calibrate the Fluke Hart Scientific temperature/relative humidity recorders needed to be capable of assuring that the products meet manufacturer’s specifications for temperature and relative humidity accuracy, which are ±0.125°C and ±1.5% respectively over the ranges 16 to 24°C and 20 to 70%. Following general policy at Fluke Hart Scientific, consistent with industry standards, the calibration standards should have uncertainties no larger than 25% of the product’s specifications. This means that the temperature reference should have an uncertainty of 0.031°C or less. Likewise, the relative humidity standard needs an uncertainty of 0.37% RH or less. The combined expanded uncertainty of the calibration, including all possible equipment and process errors, must also be held within small limits. It was agreed that a combined expanded uncertainty 1/3 or less of the product specifications was acceptable.
A two-pressure humidity generator would be used to produce the required temperatures and humidities. It had to be able to maintain very stable conditions during testing at each set-point. The chamber would need to provide a constant flow of temperature- and relative humiditycontrolled air around the sensors at a speed of 3.5 cm/s.
It was understood that slewing the chamber and settling from one calibration point to another takes time. With the many calibration points required, considering that the sequence must be repeated to collect both as-found and as-left sets of data, it was expected that a complete calibration cycle might take between 24 and 32 hours. The calibration system needed to be able to process at least 20 sensors per week, more if possible. Because of the length of time to calibrate sensors, calibrating one sensor at a time would not be practical. The system would be required to calibrate up to ten sensors simultaneously.
The calibration process was intended to operate automatically once the sensors were installed in the chamber. A computer would operate the humidity generator and collect readings from the sensors. Custom computer software was required. The computer would communicate with the humidity generator through a serial data cable. To interface to the sensors, at least one temperature/ relative humidity recorder display unit would be needed, with which the computer would also be connected. It was not practical to use multiple display units. Instead, the system would use a multi-pole switch instrument to connect sensors’ signal wires to the display unit in turn. To preserve self-heating conditions, all sensors would have to be powered continuously.
The humidity generator selected for the calibration system had sufficient accuracy to be used as the relative humidity standard. However, its inherent temperature accuracy was inadequate for this application. A separate temperature reference would be needed, one that could measure air temperature to within the required ±0.031°C and that could transmit the temperature readings to the computer through a digital interface.
Calibrating one or two temperature/relative humidity sensors at a time in an environmental chamber is common practice. What was uncommon in this case was the large quantity of sensors that needed to be calibrated at a time, and the low uncertainties required of the calibration. Some of the more significant factors that complicated the development of this calibration system were the chamber. Special effort was required to design the calibration system, addressing these and other issues, to achieve the required low uncertainties.
The design of the calibration system used to calibrate the Fluke Hart Scientific temperature/ relative humidity recorders required close attention to each component, careful consideration of all possible sources of error, and development of special procedures to maintain low uncertainties. The individual components and techniques will be discussed.
4.1 Humidity generator
The temperature/relative humidity calibration system is built around a temperature/humidity chamber, one that is large enough to contain the desired number of sensors, provides relative humidity accuracy within the required 0.37%, has reasonable temperature uniformity, and maintains stable temperature control. Thunder Scientific Corporation model 2500ST Two-Pressure Humidity Generator met these requirements [2]. The dimensions of its chamber space is 381 mm (15 in.) high, 381 mm (15 in.) wide, and 254 mm (10 in.) deep (with foam insulation installed behind the door). In the moderate temperature and relative humidity ranges used in this calibration system, under controlled conditions, and with proper, regular calibration, the humidity generator holds to an expanded uncertainty (k=2) of 0.28% relative humidity [3]. This has been verified at Fluke Hart Scientific by comparison with a dew-point hygrometer.
The Two-Pressure Humidity Generator requires a supply of compressed air. The air must be dry and clean (of oil) and maintain a pressure of at least 550 kPa (80 PSIG) for reliable operation of the chamber down to 20% RH. A pneumatic system is provided with the humidity generator. However, in the interest of maximizing long-term reliability and minimizing maintenance of the calibration system, the developers chose instead to tap into the plant air supply, using inline dryers, filters, and regulators to properly condition the air.
The flow rate of the air injected into the chamber is adjustable. To achieve the necessary 3.5 cm/s speed of air around the DUTs, considering the geometry of the test manifold (described below), it was determined to operate the humidity generator at its maximum flow rate of 20 l/min. Another important setting is the expansion valve temperature differential, VP(6). Testing showed that an optimal setting over the temperature range of interest is 0.75.
To properly control relative humidity, the generator uses a thermometer probe that must be placed in the chamber within the air flow near the DUTs. The relative humidity at chamber pressure and temperature (%RH @ PcTc) control mode is selected, for best accuracy.
The Humidity Generator has an RS-232 port with which it can be connected to a computer for automatic control and data retrieval.
4.2 Temperature reference
Since the inherent temperature uncertainty of the Humidity Generator is greater than the required 0.031°C, employment of a separate, more accurate thermometer was necessary. Of the many possible types of electrical thermometers usable in the temperature range of interest, a thermistor was deemed to be ideal because of its sensitivity, stability, availability, and reasonable cost. A Fluke Hart Scientific model 5610 Secondary Reference Thermistor Probe was selected. Its long term stability is 0.0050°C (expanded uncertainty, k=2, normal distribution). The uncertainty of its calibration is 0.0022°C (expanded, k=2, normal distribution), and its characterization between calibration points has an uncertainty of 0.0020°C (expanded, k=2, normal distribution).
The readout chosen for use with the 5610 thermistor probe is Fluke Hart Scientific model 1504 Thermometer Readout. It has an equivalent temperature uncertainty of 0.0024°C (expanded, k=2, normal distribution) over the temperature range of interest when used with the selected thermistor probe, based on the manufacturer’s published specifications. This uncertainty includes all sources of error directly associated with the readout: its calibration, nonlinearity, long-term drift, ambient temperature sensitivity, measurement noise, and round-off error. The standard uncertainty of the temperature reference, combining the probe and readout, is 0.0031°C.
4.3 Check standard
To ensure quality of calibration, the calibration system was designed to incorporate a check standard. This is an off-the-shelf temperature/relative humidity recorder sensor unit that is kept with the calibration system. It is tested each time alongside the DUTs, without changing its adjustment parameters. By observing the check standard’s test results each time and comparing to historical data, significant changes or failures of the calibration system can be identified and remedied before calibration continues.
4.4 Display unit and switch
The DUTs can be operated only when connected to a display unit, which provides electrical power, controls measuring, and reads the digital measurements. Normally, a display unit would be needed for every pair of sensors. With ten DUTs plus the check standard, using so many display units would be inconvenient. A better solution was to use just one display unit and incorporate a multi-pole switch. The display unit is a Fluke Hart Scientific model 1620 “DewK” Thermo-Hygrometer. The switch is a Keithley model 7001 Switch/Control Mainframe with one Model 7011 ten-channel, four-pole switch module. This provided an adequate number of channels and a sufficient number of poles for each of the ten DUT’s four signal lines. The check standard is connected directly to the second input of the display unit.
To preserve normal self-heating conditions, the sensors were wired for continuous power from the display unit, independent of the switch state, so that their electronic circuits would remain active at all times. The sourcing capability of the display unit is adequate to power all ten DUTs simultaneously.
The switch can be controlled by a computer linked through an IEEE-488.2 (GPIB) interface and commanded to switch to any particular channel. Cables from the switch containing signal and power wires run into the test chamber and attach to the DUTs, which are held in the test manifold.
4.5 Test manifold
Problems with sensor self-heating and the requirement for a precise speed of air made design of the test manifold critical to the performance of the calibration system. If the sensor units were simply bundled together and placed in the chamber, the heat that each dissipates would have a significant effect on the temperatures of neighboring sensors. Sensors would see temperatures higher than they should, and the temperatures would depend on the sensors’ locations in the bundle. So it was necessary to isolate each sensor. There also needed to be a way of obtaining the proper speed of air around the sensors given a constant volume flow rate of 20 l/min.
After much testing and several iterations of design, a test manifold was developed that adequately performed the necessary functions. It holds the sensor units in place in a reliable, repeatable fashion. It channels the air flow to produce the desired speed of air around each sensor. It isolates each sensor from others to largely avoid mutual self-heating. And it makes it fairly convenient to install and remove sensor units from the test chamber.
The test manifold (see exploded view, Figure 2) attaches to the humidity-controlled airstream outlet on the side wall of the test chamber with a short threaded fitting. The fitting is attached to a 196 mm (7.7 in.) diameter copper-walled cavity (1) that contains an aluminum deflector plate (2) and two perforated aluminum diffuser screens (3, not all perforations shown) which evenly spread the air flow. The air then passes through an array of 12 stainless steel 32 mm outerdiameter tubes (4) welded to a plate, which tubes envelop the ten DUT sensor units, the check standard, the temperature reference probe, and the humidity control probe. The area covered by the inner diameter of the tubes (28 mm), considering vents and leaks around the manifold that reduce the air flow, results in close to the desired 3.5 cm/s speed of air through the tubes when the flow rate is set at 20 l/min. A fiberglass plate surrounds the tubes and helps hold them. A stainless steel and fiberglass fixture (5) that slides over the tubes holds the sensor units and probes in place in the tubes and also holds the cables that attach to the DUTs.
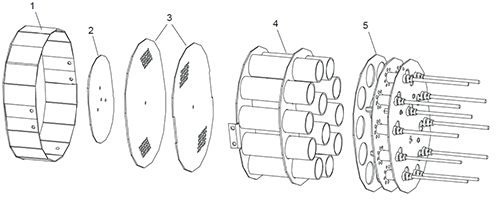
The fixture can be easily removed to facilitate quick and convenient installation of the DUTs. The ten DUTs are held in the ten tubes around the perimeter of the tube array. The check standard sensor unit is located in the upper center tube, and the temperature reference probe and humidity control probe are placed together in the lower center tube.
4.6 Temperature nonuniformity corrections
Testing revealed that despite best efforts to provide uniform airstreams to the DUTs, some temperature nonuniformity was still present in the test manifold, with as large as 0.042°C temperature difference between two most extreme tubes. This is caused not only by residual mutual selfheating of the sensor units but also natural temperature gradients in the chamber. Without correction, the effects of these biases would be too large. It was expected that the temperature nonuniformity would be fairly constant over time but dependent on the test temperature. If the temperature biases could be determined, offsetting corrections could be applied.
To measure the temperature nonuniformity biases, a profiling procedure was devised. Accepted assumptions were that temperature gradients in the manifold depended on temperature, were repeatable, and were linear in any given direction. The task was to determine the temperature difference between each tube and the tube containing the reference thermometer.
The first step was to measure the temperature differences between opposing pairs of tubes. To reduce effects of measurement errors, two sets of measurements were taken for every pair of tubes, the second with the sensor units swapped. The measured differences were averaged.
Next, the temperature gradients were calculated in two directions (vertical and horizontal) by dividing the temperature differences by the distance between the tubes. These calculations were independent for each of two sets of four tubes arranged in rectangular arrays. The leftover two tubes, at the very top and very bottom, required calculation of the temperature gradient in only one direction.
Finally the temperature bias for each tube was calculated. For each tube, its horizontal and vertical positions relative to the location of the reference thermometer were multiplied by the calculated horizontal and vertical gradients respectively, and the two products added together.
This profiling procedure was repeated at every test temperature.
Now, with information on the temperature biases, corrections to the reference temperature can be applied to more accurately estimate the true temperature at each DUT position. It is estimated that by applying the corrections, errors due to temperature nonuniformity are reduced to within ±0.01°C.
4.7 Calibration points
During calibration, the DUTs must be tested at the extremes of their specified temperature and relative humidity measurement ranges. Using just two calibration points, offset and slope adjustment parameters can be determined. However, using three points offers some advantages. Adding a third point can improve the characterization of the sensors because it allows the calibration to minimize the maximum error through the entire range, not just at the endpoints. Also it provides information regarding the quality of the characterization and calibration process. The extra calibration point should be near the center of the range. Table 1 summarizes the calibration points used to calibrate the Fluke Hart Scientific temperature/relative humidity recorder. The calibration procedure requires that the actual temperature and relative humidity be within ±0.25°C and ±0.5% RH respectively of the nominal calibration point. The sequence of calibration points is somewhat arbitrary. This order was chosen to minimize the time of calibration. The sequence is performed twice, first to collect as-found error measurements for the test report (which measurements are also used to calculate new offset and slope adjustment parameters) and second to collect as-left error measurements for the test report.
Table 1. Calibration points.
| Step | Phase | Measurement | Temperature | Relative humidity |
| 1 | as-found | T1 | 16°C | 45% |
| 2 | as-found | T2 | 20°C | 45% |
| 3 | as-found | RH2 | 20°C | 45% |
| 4 | as-found | T3 | 24°C | 45% |
| 5 | as-found | RH1 | 20°C | 20% |
| 6 | as-found | RH3 | 20°C | 70% |
| 7 | adjustment | - | - | - |
| 8 | as-left | RH3 | 20°C | 70% |
| 9 | as-left | RH1 | 20°C | 20% |
| 10 | as-left | T1 | 16°C | 45% |
| 11 | as-left | T2 | 20°C | 45% |
| 12 | as-left | RH2 | 20°C | 45% |
| 13 | as-left | T3 | 24°C | 45% |
4.8 Settling
The Humidity Generator takes time to change from one temperature or relative humidity to another and settle. The DUTs also require adequate time to settle to within a low enough uncertainty. The settling time depends on the change, ranging from 2 hours for a 4°C change, 2 ½ hours for an 8°C or 25% RH change, to 3 hours for a 50% RH change.
When temperature and relative humidity set-points must both be changed, temperature is changed first. Then after 20 minutes, the relative humidity is changed. This avoids transient saturation conditions that can occur if they are changed at the same time. As an extra check to ensure conditions have settled before calibration proceeds, the temperature and relative humidity readings of the references are monitored and verified to be within acceptable limits.
4.9 Computer software
The calibration system is controlled by a PC computer running custom software. The computer communicates to the humidity generator and thermo-hygrometer display unit through RS-232 interfaces, to the temperature reference readout and switch through an IEEE-488 interface, and to a database server through an Ethernet network.
The software was produced in house using Visual Basic. It displays a window that allows the operator to start and stop the test and shows the progress of the calibration and preliminary results. As the test proceeds, it performs the following operations:
4.10 Environment
To preserve low uncertainties, the calibration system must be operated in a controlled environment with (what else?) a Fluke Hart Scientific temperature/relative humidity recorder. Readings from this are checked to ensure proper conditions for calibration.
The temperature calibration uncertainty budget for the calibration system is shown in Table 2, in accordance with ANSI/NCSL Z540-2-1997, U.S. Guide to the Expression of Uncertainty in Measurement [4]. Individual components are listed with their estimated standard uncertainties. All are expected to be uncorrelated. The calculated combined standard uncertainty and expanded uncertainty, k = 2, are given. Each of the components is explained next.
Table 2. Temperature calibration uncertainties.
| Description | Type | Standard uncertainty, °C |
| Temperature reference | B | 0.0031 |
| Manifold nonuniformity (corrected) | A | 0.01 |
| Settling, stability | A | 0.01 |
| Air speed and self-heating | B | 0.0025 |
| DUT hysteresis | A | 0.0 |
| DUT drift | A | 0.0 |
| DUT noise and round-off | A | 0.0029 |
| Calibration point extrapolation | A | 0.0006 |
| Combined standard uncertainty | 0.015 | |
| Combined expanded uncertainty, k=2 | 0.030 |
4.1 Temperature reference
The temperature reference uncertainty includes the temperature reference probe and readout related uncertainties, as explained previously, with a result of 0.0031°C standard uncertainty.
4.2 Manifold nonuniformity
Much of the manifold nonuniformity is corrected, as explained previously. Some uncertainty remains because there is some error in measuring the biases, and some small variation over time is possible. Repeated tests of the nonuniformity and statistical analysis lead to an estimated standard uncertainty of 0.01°C for the corrected manifold nonuniformity.
4.3 Settling stability
Settling characteristics of the humidity generator, test manifold, and DUTs were studied with repeated tests. Then settling times for each set-point were chosen to ensure errors due to settling and instability of no greater than 0.01°C standard uncertainty.
4.4 Air speed and self-heating
As explained previously, the DUTs exhibit self-heating which depends on the speed of air flow around them. The calibration procedure defines the air speed to be 3.5 cm/s. There is uncertainty in achieving this exact speed because of uncertainties of the humidity generator’s flow rate, test manifold geometry, venting and leakage, and nonuniformity of the airstream. This uncertainty, in conjunction with the tested DUT self-heating sensitivity to speed of air, results in an estimated self-heating uncertainty of 0.0025°C.
4.5 DUT hysteresis
Hysteresis of the DUT should always be considered. In this case, no significant hysteresis has been observed with the temperature sensor. The DUT hysteresis uncertainty is taken as 0.
4.6 DUT drift
Often a DUT will drift some amount while calibration is proceeding, which contributes to calibration uncertainty. In this case, however, no significant drift has been observed with the temperature sensor. The DUT drift uncertainty is taken as 0.
4.7 DUT noise and round-off
Random noise of the DUT’s temperature measurement is small and is masked by round-off error. With a display resolution of 0.01°C, the error is uniformly distributed within limits of ±0.005°C, giving a standard uncertainty of 0.0029°C.
4.8 Calibration point extrapolation
The calibration procedure precisely defines the calibration temperature. However, the exact temperature is not achieved in practice. This might have a small effect on the calibration because the DUT error curve versus temperature might have a slight slope. The calibration is designed so that the calibration point has a standard uncertainty ±0.125°C (verified by testing and limited by checks). The slope of the DUT error curve has a range of ±0.005°C/°C standard deviation, leading to a calibration point extrapolation standard uncertainty of 0.0006°C.
The relative humidity calibration uncertainty budget for the calibration system is shown in Table 3, in accordance with ANSI/NCSL Z540-2-1997, U.S. Guide to the Expression of Uncertainty in Measurement [4]. Individual components are listed with their estimated standard uncertainties. All are expected to be uncorrelated. The calculated combined standard uncertainty and expanded uncertainty, k = 2, are given. Each of the components is explained next.
| Description | Type | Standard uncertainty, °C |
| Humidity generator | B | 0.14 |
| Settling, stability | A | 0.07 |
| Temperature nonuniformity | A | 0.06 |
| DUT hysteresis | A | 0.15 |
| DUT drift | A | 0.0 |
| DUT noise and round-off | A | 0.029 |
| Combined standard uncertainty | 0.227 | |
| Combined expanded uncertainty, k=2 | 0.454 |
5.1 Humidity generator
The relative humidity produced by the humidity generator is taken to have an expanded uncertainty (k=2) of 0.28% RH and a standard uncertainty of 0.14%, based on the published uncertainty analysis [3].
5.2 Settling stability
Settling characteristics of the humidity generator, test manifold, and DUTs were studied with repeated tests. Then settling times for each set-point were chosen to ensure errors due to settling and instability no greater than 0.07% RH standard uncertainty.
5.3 Temperature nonuniformity
Since relative humidity is affected by temperature (up to 4.2%/°C at 24°C and 70%RH), temperature nonuniformity in the test manifold contributes to relative humidity error. It was deemed impractical to attempt to correct for these errors, and they were estimated to be sufficiently small. Given a temperature nonuniformity error that is uniformly distributed with a range of ±0.025°C, calculating the effect of this on relative humidity results in a standard uncertainty of 0.06%.
5.4 DUT hysteresis
Hysteresis of the DUT’s humidity sensing device is significant. It is actually the largest single contributor to calibration uncertainty. Testing resulted in an estimation of relative humidity hysteresis that has a standard uncertainty of 0.15%.
5.5 DUT drift
No significant drift has been observed with the relative humidity sensor, so this uncertainty is taken as 0.
5.6 DUT noise and round-off
Random noise of the DUT’s relative humidity measurement is small and is masked by round-off error. With a display resolution of 0.1%, the error is uniformly distributed within limits of ±0.05%, giving a standard uncertainty of 0.029%.
Uncertainty analysis shows that the calibration system devised for the Fluke Hart Scientific temperature/ relative humidity recorder achieves 0.030°C and 0.454% expanded uncertainty (k=2) respectively for temperature and relative humidity calibration. These hold even while calibrating ten DUTs at once. These uncertainties have subsequently been verified by comparing against calibrations performed on one sensor at a time and by checking against a dew-point hygrometer. The uncertainties are within the acceptable limits of 0.042°C and 0.5% RH.
The authors recognize Tom Wiandt for his invaluable expertise contributed to the project. The calibration system was built upon his groundwork, and he provided much continuing support. They also acknowledge the efforts of Dave Farley who offered his significant mechanical skills. He designed and built the test manifolds. Additionally, the researchers and developers relied on many other professionals at Fluke Hart Scientific as well as at Thunder Scientific Corporation for the success of this endeavor.